EL CAMPO FLUIDO
Admitida la validez del continuo en el medio fluido, es posible definir en cada punto un vector de posición x, en cada instante de tiempo t, al que se asociarán las diferentes variables del fluido: vector velocidad v(x,t), presión, temperatura, densidad, etc. Esta forma de describir el campo fluido se denomina euleriana y sirve para analizar las variaciones de las magnitudes físicas en puntos fijos del espacio.Se plantea el estudio desde un punto de vista lagrangiano si las magnitudes físicas no se refieren al punto del espacio, sino a la partícula fluida que pasa en el mismo instante por ese punto. Una partícula fluida es la cantidad diferencial de sustancia asentada en el continuo en la que están definidas las magnitudes intensivas. Desde la perspectiva lagrangiana, son válidas las leyes fundamentales en su forma clásica (por lo que este método presenta algunas ventajas en su formulación), si bien, en realidad, el tratamiento de los fluidos aconseja adoptar la perspectiva euleriana.
Definiciones y magnitudes cinemáticas
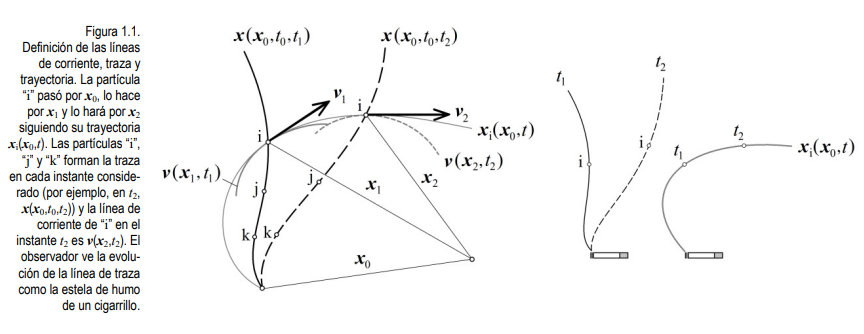
La trayectoria de una partícula que en un instante anterior estuvo en x0 es una ecuación vectorial, desde el punto de vista lagrangiano, tal que:


Las líneas de corriente, las trayectorias y las líneas de traza coinciden en el movimiento permanente o estacionario, que se define como aquel movimiento en el que la velocidad no depende del tiempo, aunque pueda depender del espacio v(x). Por definición, en un movimiento permanente, todas las magnitudes fluidas son independientes del tiempo, pero un movimiento puede ser permanente en un sistema de referencia y no serlo en otro. Si la velocidad no depende del espacio, aunque pueda depender del tiempo v(t), el movimiento se denomina uniforme. Esta condición es bastante restrictiva e infrecuente, pues implica que el vector velocidad es el mismo en todo el campo fluido, tanto en dirección como en módulo, y sólo se presenta en los flujos no perturbados y en algunos casos idealizados. En la práctica, no obstante, es común describir como uniforme el movimiento que se mantiene idéntico a sí mismo. Por ejemplo, en el flujo completamente desarrollado en un conducto de sección recta constante, el perfil de la distribución de la velocidad es la misma en todo el conducto y, por tanto, se dice que el flujo es uniforme en él. Además, si el fluido es incompresible y el conducto, indeformable, entonces cualquier cambio temporal del caudal transportado afecta, al instante, a todo el conducto, en el que el flujo se mantendrá uniforme,2 aunque no sea permanente.
Se denomina flujo convectivo de una magnitud a través de una superficie fija, en un sistema de referencia dado, la cantidad de esa magnitud que la atraviesa por unidad de tiempo:

La circulación del vector velocidad a lo largo de una línea cualquiera, L, se define como:
 y es una magnitud cinemática que ayuda a interpretar el movimiento fluido porque, como se verá a continuación, está relacionada con la existencia o no de rotación. Son muchas las situaciones prácticas en las que el movimiento del fluido sigue trayectorias curvilíneas alrededor de un punto central, aunque ello no siempre indica que el fluido rote como un sólido rígido. Cuando se calcula la circulación en una línea de corriente que se cierra sobre sí misma formando un círculo en el que la velocidad es constante, se obtiene la siguiente dependencia funcional entre la circulación, la velocidad y el radio del círculo:
y es una magnitud cinemática que ayuda a interpretar el movimiento fluido porque, como se verá a continuación, está relacionada con la existencia o no de rotación. Son muchas las situaciones prácticas en las que el movimiento del fluido sigue trayectorias curvilíneas alrededor de un punto central, aunque ello no siempre indica que el fluido rote como un sólido rígido. Cuando se calcula la circulación en una línea de corriente que se cierra sobre sí misma formando un círculo en el que la velocidad es constante, se obtiene la siguiente dependencia funcional entre la circulación, la velocidad y el radio del círculo:
 En mecánica de fluidos, se define el vector vorticidad o vector torbellino como el rotacional del vector velocidad en un punto:
En mecánica de fluidos, se define el vector vorticidad o vector torbellino como el rotacional del vector velocidad en un punto:

También se definen, por analogía a las líneas y a los tubos de corriente, las líneas de remolino, Ω^sdl = 0, que son las envolventes del vector vorticidad, y los tubos de vórtices o remolino, cuyas paredes están formadas por líneas de remolino. Como el campo de vorticidad es un campo solenoidal, ya que su divergencia Ω·Ω es cero y, en consecuencia, el flujo de Ω a través de una superficie cerrada es nulo, resulta que el flujo de la vorticidad es constante en el tubo de remolino en un instante dado de tiempo. Esta propiedad cinemática es sumamente importante y es independiente del tipo de fluido o del modelo de flujo que se presente

La vorticidad es una medida de la rotación del fluido en torno a un punto, y se denomina irrotacional aquel movimiento para el que es cero. Estos movimientos son potenciales en un dominio simplemente conexo, es decir, son movimientos en los que la velocidad deriva de un potencial escalar:

En un movimiento irrotacional, se demuestra que el potencial Φ es la circulación, independientemente del camino, entre el punto X0, donde el potencial es nulo, hasta el punto x. En otras palabras, cuando la velocidad deriva de un potencial, su circulación en una línea cerrada es nula. De esta ecuación se deduce que las líneas equipotenciales y las líneas de corriente son ortogonales en el campo fluido irrotacional simplemente conexo. Más adelante, se demostrará que la divergencia de la velocidad es nula en los fluidos incompresibles, lo que conduce a la ecuación de Laplace: ᐁ2 Φ = 0.
El gradiente en una dirección n de una propiedad n, escalar o vectorial, se obtiene a partir del operador n*ᐁ. En consecuencia, las operaciones v *ᐁΦ y Ω*ᐁΦ, representan el gradiente de dicha propiedad en la dirección de las líneas de corriente y de las líneas de remolino, respectivamente. Esto es, la condición v *Ωv = 0 indica que la velocidad es constante a lo largo de la línea de corriente, lo que ocurre en los movimientos unidireccionales incompresibles, mientras que su homóloga, Ω*ᐁv = 0, se presenta en los movimientos bidimensionales, en los que Ω y v son, necesariamente, perpendiculares.





Sistemas coordenados ortogonales
Las coordenadas cartesianas {xyz} no son la única forma de describir la posición de un punto en el espacio. En general, la posición puede determinarse mediante fórmulas del tipo x = x(q1,q2,q3), donde {q1q2q3} son las coordenadas generalizadas del sistema de referencia elegido. La relación entre este sistema y el cartesiano, o entre dos sistemas cualesquiera de coordenadas curvilíneos, puede realizarse mediante las fórmulas de transformación qi = qi(x,y,z), o bien mediante sus inversas xi = xi(q1,q2,q3).
Las ecuaciones qi = qi(x,y,z) =C, donde C es una constante, son una familia de superficies coordenadas cuyas intersecciones por parejas definen las líneas coordenadas. Cuando los vectores unitarios a lo largo de dichas líneas coordenadas, e1, e2 y e3, son perpendiculares en todo punto del espacio, entonces el sistema de coordenadas curvilíneo se identifica como ortogonal y la transición infinitesimal a lo largo de las líneas coordenadas se obtiene mediante la forma incremental:



En ocasiones, es más práctico solucionar un problema en un sistema coordenado, pero se prefiere presentar los resultados en otro sistema. La conversión entre dos sistemas se realiza mediante la denominada matriz de transformación, en cuyas filas se encuentran las componentes de la base destino con respecto a la de origen. Por ejemplo, como la base local unitaria en coordenadas cilíndricas con respecto a la cartesiana es:

si las componentes del vector OA de la figura 1.3 en la base rectangular son (xA,yA,zA), entonces sus componentes en la base cilíndrica, (cr,cθ,cz), son:




Relaciones de Frenet y coordenadas naturales
El triedro de Frenet en geometría diferencial es un sistema de coordenadas local creado sobre una curva en el espacio, cuya terna unitaria de vectores base (s,n,b) está definida sobre la dirección de la tangente a la curva, su normal principal y la dirección binormal. La orientación relativa entre los vectores de la base se define en sentido dextrógiro y los planos que contienen los vectores (s,n) y (n,b) se denominan osculador y normal, respectivamente.
En comparación con otros sistemas de coordenadas, el sistema de coordenadas intrínsecas no sirve, en general, para describir la posición de cualquier punto en el espacio, sino sólo su ubicación a lo largo de una curva cualquiera, en principio conocida y parametrizable.9 Para identificar la posición de un punto P de la curva, es necesario definir su origen O, la distancia medida a lo largo de la misma con respecto a dicho origen y un sentido positivo de desplazamiento. Siendo s la coordenada genérica o abscisa curvilínea de la curva a lo largo de su tangente, y r(s) el vector OP correspondiente, el vector tangente s(s) se define como:



A medida que el punto P se desplaza a lo largo de la curva definida por s, el marco de Frenet puede rotar y los vectores de la base sujetos a P pueden cambiar de dirección. La rotación asociada a este desplazamiento se contempla mediante el denominado vector de Darboux, que se define como:


La primera de estas ecuaciones permite definir analíticamente la curvatura, κ, cuya inversa se sabe que es el radio de curvatura, el cual, según [1.27], es siempre positivo o cero.
Cuando la curva alcanza un punto de inflexión, se produce una singularidad, que conduce a una indefinición del marco de Frenet que limita o condiciona su uso. Esta circunstancia se resuelve imponiendo restricciones al vector normal y definiéndolo en los puntos singulares de la curva. En resumen, se define el sistema natural de coordenadas, en el que el vector normal se define positivo cuando apunta a la izquierda de s, de la curva en definitiva, y también en los puntos de inflexión. Como corolario, la concavidad y el radio de curvatura son también definidos positivos en el mismo sentido, y así se cumple que la curvatura en el sistema natural de coordenadas es el número real que resulta del producto escalar:
 donde:
donde:

cuando ds/ds apunta a la derecha de s. Obsérvese que la definición del sistema natural de coordenadas no afecta las relaciones de Frenet ni el sentido del vector normal, que sigue dirigido hacia el centro de curvatura, sino sólo su signo.
 Las relaciones de Frenet [1.30] también pueden escribirse de forma matricial. Además, utilizando la regla de derivación en cadena para introducir el módulo de la velocidad v, resulta:
Las relaciones de Frenet [1.30] también pueden escribirse de forma matricial. Además, utilizando la regla de derivación en cadena para introducir el módulo de la velocidad v, resulta:




Para concluir este apartado, cabe mencionar la forma en que se describen la aceleración de la partícula y su vorticidad en coordenadas naturales. Es bien sabido que la aceleración resulta de la expresión:

donde at representa la aceleración tangencial, o variación del módulo de la velocidad; an es la aceleración normal, que representa la variación en dirección de la velocidad y se halla contenida en el plano osculador, y r = 1/κ es el radio de curvatura en ese punto. Se sigue que la aceleración de la partícula no tiene componente en dirección binormal, lo que evidentemente no quiere decir que sobre la partícula no puedan actuar fuerzas en esa dirección, sino que la resultante de las fuerzas aplicadas en b es nula.
No es tan conocida ni tan fácil de interpretar la expresión que rige la vorticidad en un
punto. En el caso tridimensional más general, y por componentes, es:

Es evidente que, en caso de movimiento plano o axilsimétrico sin velocidad acimutal, la vorticidad sólo podría ser perpendicular al plano osculador, es decir, sólo Ωb sería no nula. En cualquier otro caso, la vorticidad puede tener componentes en las tres direcciones de la base local, lo que genera todo un subconjunto de superficies de flujo características.
Sin entrar en más detalles de los estrictamente necesarios, la condición Ωn = 0 por sí sola es condición necesaria y suficiente para la existencia de una familia de superficies de un solo parámetro, en las que las líneas de corriente son líneas geodésicas; las líneas normales, perpendiculares a la superficie, y las líneas binormales, paralelas entre sí. Esta condición también implica que el vector de Darvoux y la vorticidad sean paralelos, pues entonces el vector de Lamb, Ω˄v, es paralelo a n. 13 Si es Ωs la que es nula, entonces las líneas de corriente y las de remolino son perpendiculares entre sí y ambas son geodésicas sobre la superficie. Esta condición también tiene otra consecuencia importante en el estudio del flujo: el sistema natural de coordenadas puede transformarse en cualquier otro sistema ortogonal, siempre que la densidad de helicidad, v ·Ω, sea nula; es decir, el sistema natural de coordenadas es también un sistema ortogonal en aquellos movimientos no helicoidales para los que Ωs = 0.
Por otro lado, cuando Ω = Ωss, se obtiene el flujo de Beltrami, para el que el vector de Lamb es cero y en el que el flujo está formado por vórtices longitudinales cuyas líneas de corriente tienen forma helicoidal y coinciden con las líneas de remolino. En estos movimientos, las partículas de fluido por separado tienen el movimiento de un sólido rígido y una velocidad paralela al eje de rotación de la partícula aislada: cuanto más cerca se encuentra una línea de corriente del eje central, más estirada es su forma y mayor es la velocidad del flujo.

La derivada sustancial

El término de la izquierda de esta ecuación es la derivada de la propiedad cuando el observador sigue la partícula en su movimiento, y coincide con el punto de vista de Lagrange. El primer término de la derecha es la denominada derivada local de dicha propiedad, que es su variación temporal en el punto fijo considerado, mientras que el último término de la derecha es la derivada convectiva, o cambio de la propiedad con el movimiento en el campo fluido.
La aceleración de una partícula fluida se calcula, conforme a [1.36], como:

El primer término de la derecha es la aceleración local y no tiene una interpretación física directa ya que, de hecho, no es una aceleración, pues representa la diferencia de velocidad de dos partículas distintas por unidad de tiempo. El segundo sumando debe entenderse como el producto escalar del vector velocidad por el tensor gradiente de velocidad, y representa el gradiente de la velocidad en la dirección de la línea de corriente.
Cuando las coordenadas son cartesianas o bien Φ es un escalar, es útil definir el operador derivada sustancial como:
 que es equivalente a la [1.37] y válida en cualquier tipo de coordenadas, porque resulta útil relacionar la aceleración de la partícula fluida con su vorticidad, a través del vector de Lamb, y con el gradiente de la energía cinética específica.
que es equivalente a la [1.37] y válida en cualquier tipo de coordenadas, porque resulta útil relacionar la aceleración de la partícula fluida con su vorticidad, a través del vector de Lamb, y con el gradiente de la energía cinética específica.

Teoremas fluidos
En este apartado, se describen algunos de los teoremas más importantes que se aplican a la cinemática del medio de fluido. Estos teoremas permiten relacionar entre sí algunas de las magnitudes descritas hasta el momento y ofrecen un marco matemático básico, a la vez que necesario, que permite explicar mejor el movimiento fluido y ayuda a interpretarlo.El teorema de Gauss-Ostrogradskii relaciona el flujo convectivo de una determinada propiedad a través de una superficie cerrada con la divergencia de su vector o tensor flujo en el volumen encerrado por dicha superficie. Esto es:
Si el movimiento del fluido es permanente y tal que Ω es constante, por ejemplo cuando el fluido rota en torno a un eje, entonces [1.43] se transforma en:

Otro enunciado del teorema de Kelvin afirma que la circulación a lo largo de una línea cerrada constituida siempre por los mismos elementos de fluido es constante. El movimiento puede ser rotacional o no, pero, si es irrotacional porque parte del reposo o es uniforme, se mantendrá irrotacional mientras la aceleración derive de un potencial.17 Si el movimiento es rotacional y existen tubos de remolino, puesto que la circulación es la misma sobre cualquier línea perimétrica del tubo de remolino y se mantiene constante en este caso, el vector Ω se intensifica a medida que la sección transversal del tubo tiende a cero para mantener su flujo constante (figura 1.2). Como la velocidad no puede hacerse infinita al aumentar la vorticidad, se concluye que los tubos de remolino han de ser cerrados o terminar en un contorno sólido o en una superficie libre.
En mecánica de fluidos, un volumen fluido, VF, es un sistema material cerrado al que no entra ni del que sale masa a través de su superficie: es un sistema fluido de masa constante. Para la formulación de los principios fundamentales de la mecánica de fluidos, es fundamental tener en cuenta la variación de cualquier magnitud física asociada al volumen fluido. Integrales extendidas a volúmenes fluidos
Si Φ es una magnitud fluida intensiva ligada al fluido, la propiedad extensiva asociada a un volumen fluido es:


Como la segunda integral de la ecuación [1.48] es el flujo convectivo de la propiedad Φ a través de la superficie, el teorema de Gauss-Ostrogradskii conduce a:

Es importante advertir que, aunque el volumen fijo no es el volumen fluido y sólo coincide con él en el instante considerado, no existe límite para su valor. En otras palabras, el volumen de la ecuación [1.49] puede ser cualquiera, ya que la integral está tomada en un instante y cualquier volumen puede ser volumen fluido.
Con frecuencia, es más cómodo referir la derivada de una integral a volúmenes que coincidan con la geometría variable del contorno. Sea VC un volumen de control dependiente del tiempo y cuya superficie se mueve a una velocidad vC. La derivada temporal de la propiedad ΦC contenida en dicho volumen es:

Comentarios
Publicar un comentario